Dear everybody, yesterday and today were quite successful days for me. Since this is a blog, I will tell you how I first get in touch with programming community in my life (well, that is half the truth, once I registered for an National Instruments Labview forum, but never participated actively). It was quite easy: I registered myself at Stack Overflow, which is some kind of programming community/a platform for Q&A regarding programming questions.
The reason was, I don’t had a clue, how to proceed with the problem I wrote about some entries ago (read a buffer, while buffersize in total exceeds memorysize I can get with one request). I believe there are a lot of elegant solutions, including state machines, while/if/-statements etc, but since I’m a beginner, I prefer to stick with the „solid“ but complicated coding right now. Maybe at some point I have more knowledge to do it in a more efficient way.
So my idea was, registering at Stack Overflow and ask my question(s). Registration was quite easy, and the steps to finally ask my question self describing.
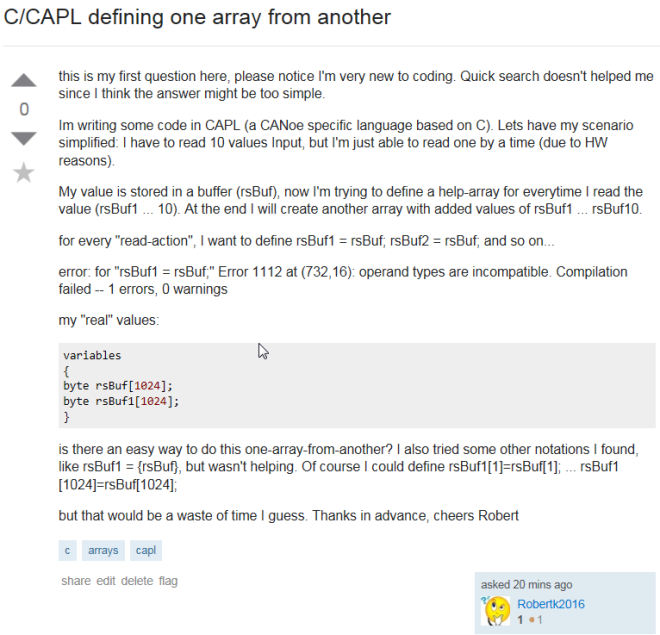
A very short time after my question, I got really good help from 2 guys (thanks at users @Shark @Lundin):
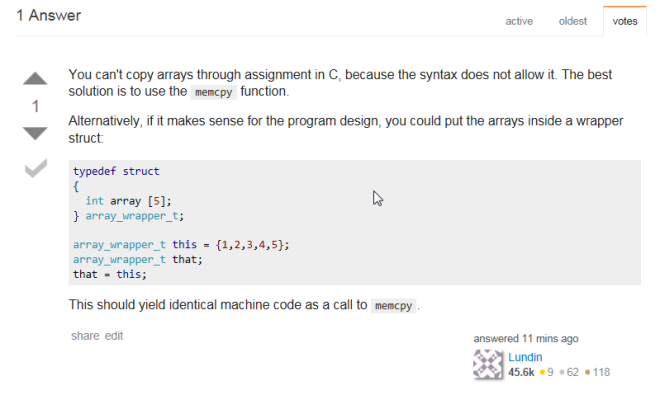
with which help I was able to build my working code (I segregated my memory-read function in [n] functions, where n = triggered from function n-1 via on timer trigger):
variables
{
msTimer ReadReqTimer;
…
msTimer ReadReqTimerN;
int ReadTimeDef = 1000; // 1 second timer (when used as msTimer as stated above)
byte rqBuffer[256]; // request buffer (Tx data) – 256 bytes
byte rsBuffer[256]; // receive buffer (Rx data)
byte rsBuffer1[256]; // help buffer for reiceiving 1
…
byte rsBufferN[1024]; // help buffer for receiving N
char Outputstring[2048]; // array/buffer for output function
int diagnosticaction = 0; // value for different diagnosis cases/actions
dword glbHandle = 0; // handling of output function
}
void Diagnosisrequest ( byte diagnosticaction) /* I have built different cases for different diagnosis actions here */
{
case 1: /* case1: read memory */
… /*some code for validation in between*/
{
rqBuffer[0] = 0x01; /* I defined the data transferred with a send request via CAN msg (transport via OSEK fct) */
rqBuffer[1] = 0x02; /* this would be data 01 02 03 04 (lets assume this would be a function to read my memory) */
rqBuffer[2] = 0x03;
rqBuffer[3] = 0x04;
… /*some code for sending this request via OSEK fct*/
setTimer (ReadReqTimer, ReadTimeDef);
}
break;
}
on timer ReadReqTimer
{
if (condition) /* a condition for validation of Response */
{
/* start last request: analog you would define your requests 2, 3, 4..n, like how much steps do you need. */
diagnosticaction = XYZ; /* see definition below*/
rqBuf[0] = 0x01;
rqBuf[1] = 0x02;
rqBuf[2] = 0x03;
rqBuf[3] = 0x05; /* this would be data 01 02 03 05 (lets assume this would be a function to read another part of memory) */
… /*some code for sending this request via OSEK fct
setTimer ( ReadReqTimer1, ReadTimeDef); // set next timer … ReadReqTimer1, 2, … n
}
}
void handleResponse
{
switch(diagnosticaction)
{
case 0: /*some other case, e.g. no action*/
break;
case 1: /* read memory */
if (rsBufer[0] == 0xXYZ) // XYZ would be a hex-number (e.g. 01), for checking a valid incoming response message
{
memcpy(rsBuffer1, rsBuffer, 1024);
}
else if (condition)
doSomethingorDoNothing;
break; // brake statement, this is important to terminate case
case XYZ: /* our latest case for memory-read – copy together the buffer from former response Buffers and print it to a file (see also former blogentry) */
if (rsBufer[0] == 0xXYZ) /* XYZ would be a hex-number (e.g. 01), for checking a valid incoming response message */
{
memcpy(rsBufferN, rsBuffer, 1024);
glbHandle = openFileWrite („filename.txt“,0); /* Format and print buffer data */
snprintf(Outputstring, elcount(Outputstring), „memory read: %02X %02X %02X % 02X %02X %02X\n“, rsBuffer1[1], rsBuffer1[…], rsBuffer1[n], rsBufferN[1], rsBufferN[…], rsBufferN[n]);
filePutString (Outputstring, elcount(Outputstring),glbHandle);
fileClose(glbHandle);
}
else if (condition)
doSomethingorDoNothing;
break; /* brake statement, this is always important to terminate case */
}
}
